|
|
|||||||||||||||||||||||||||||||||

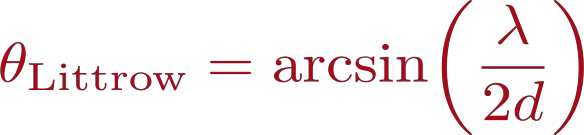
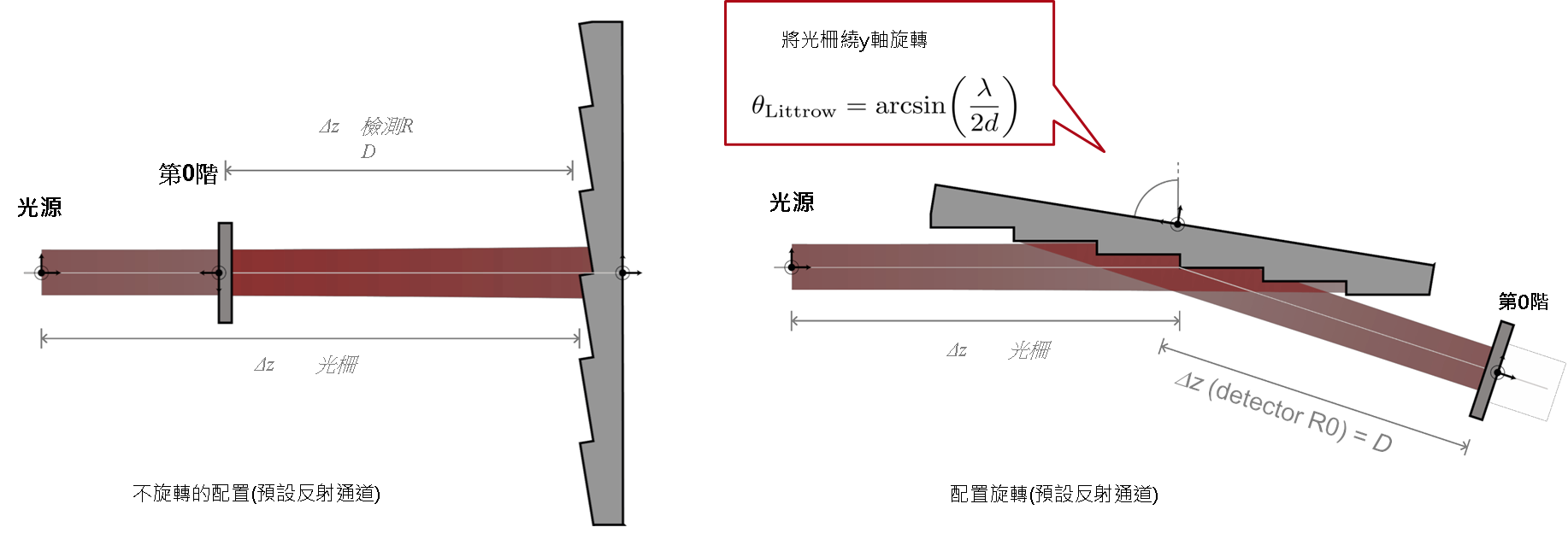
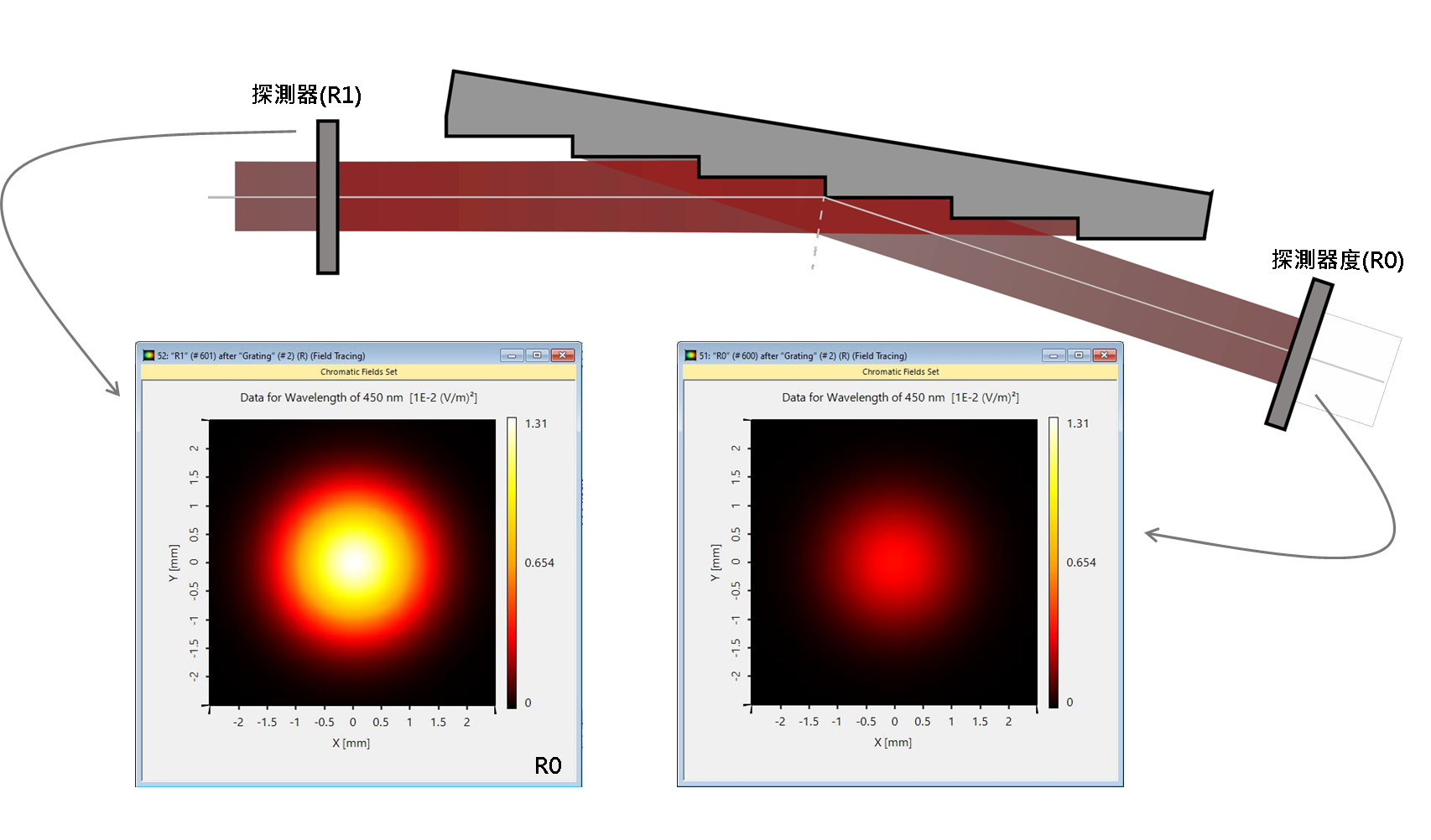
 分別表示入射角、繞射角和繞射階數。
分別表示入射角、繞射角和繞射階數。


關於我們
公司介绍專家團隊 人才招聘 訊技風采 員工專區 |
服務項目
產品銷售課程中心 專業書籍 項目開發 技術諮詢 |
聯繫方式
地址:新北市永和區中正路746號9樓之5電話:+886-2-3233-2748 傳真:+886-2-3322-9865 課程:course@infotek.com.tw 業務:sales@infotek.com.tw 技術:support@infotek.com.tw |
官方微信 |
Copyright © 2014-2025 訊技科技股份有限公司, All Rights Reserved.