摘要
在增強現實和混合現實應用 (AR & MR) 領域的光波導光學器件設計過程中,橫向均勻性(每個視場模式)和整體效率是兩個最重要的評價函數。 為了在光波導系統中獲得適當的均勻性和效率值,有必要允許光柵參數的變化,特別是在擴展器和/或輸出耦合區域中。 為此,VirtualLab Fusion 能夠在光柵區域中引入平滑變化的光柵參數,並提供必要的工具來根據定義的評價函數運行優化。 此案例展示了如何使用連續變化的填充因數值優化光波導,以獲得足夠的均勻性。
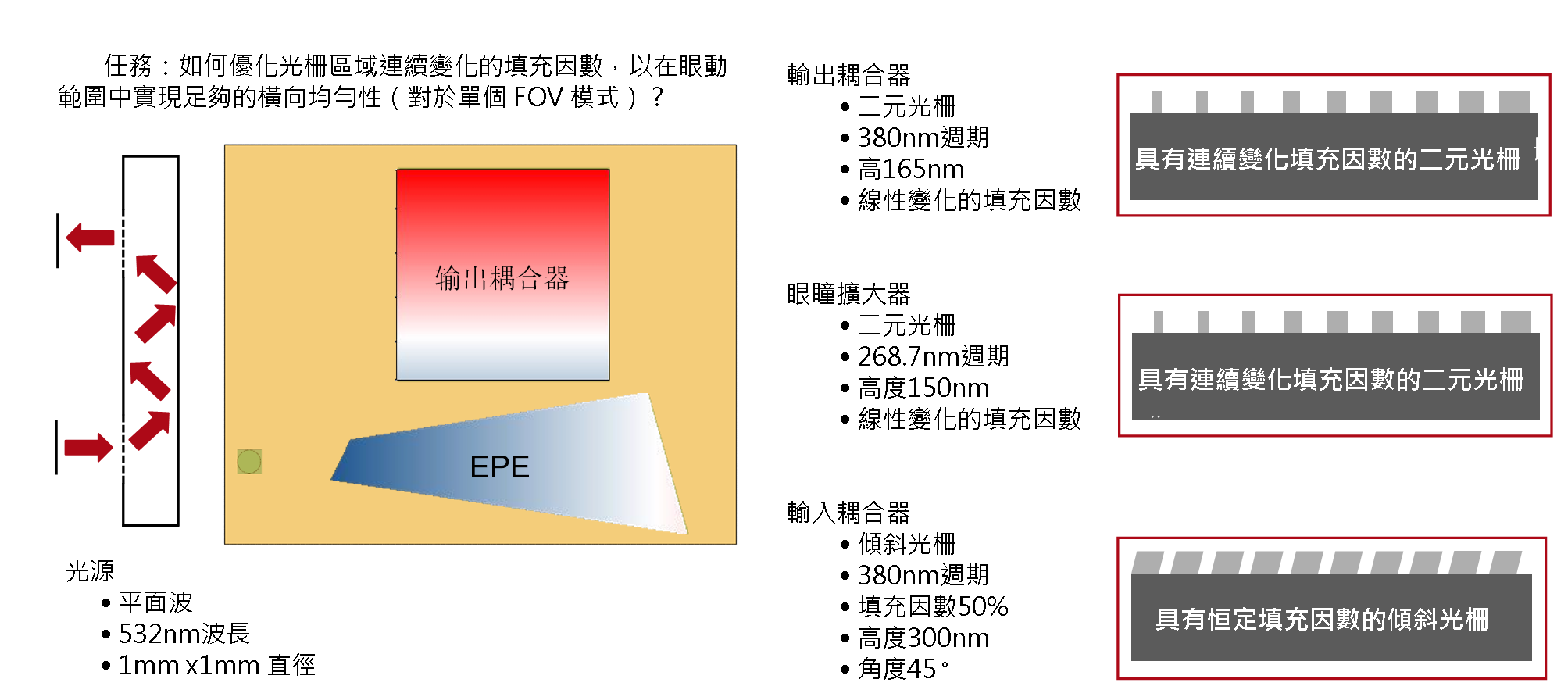
任務描述
光波導組件
 使用光波導元件,可以輕鬆定義具有複雜形狀區域的光波導系統。 此外,這些區域可以配備理想化或真實的光柵結構,以充當輸入耦合器、輸出耦合器或出瞳擴展器。 更多資訊請見:
使用光波導元件,可以輕鬆定義具有複雜形狀區域的光波導系統。 此外,這些區域可以配備理想化或真實的光柵結構,以充當輸入耦合器、輸出耦合器或出瞳擴展器。 更多資訊請見:
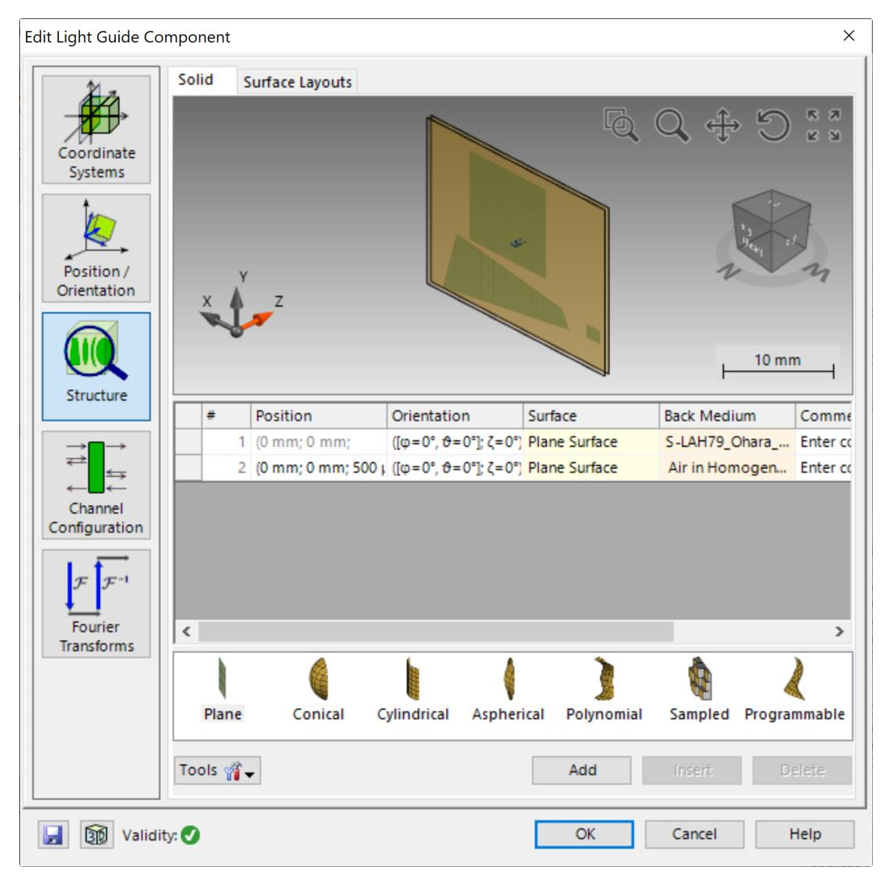
 光波導的構造 光波導的構造
光柵區域
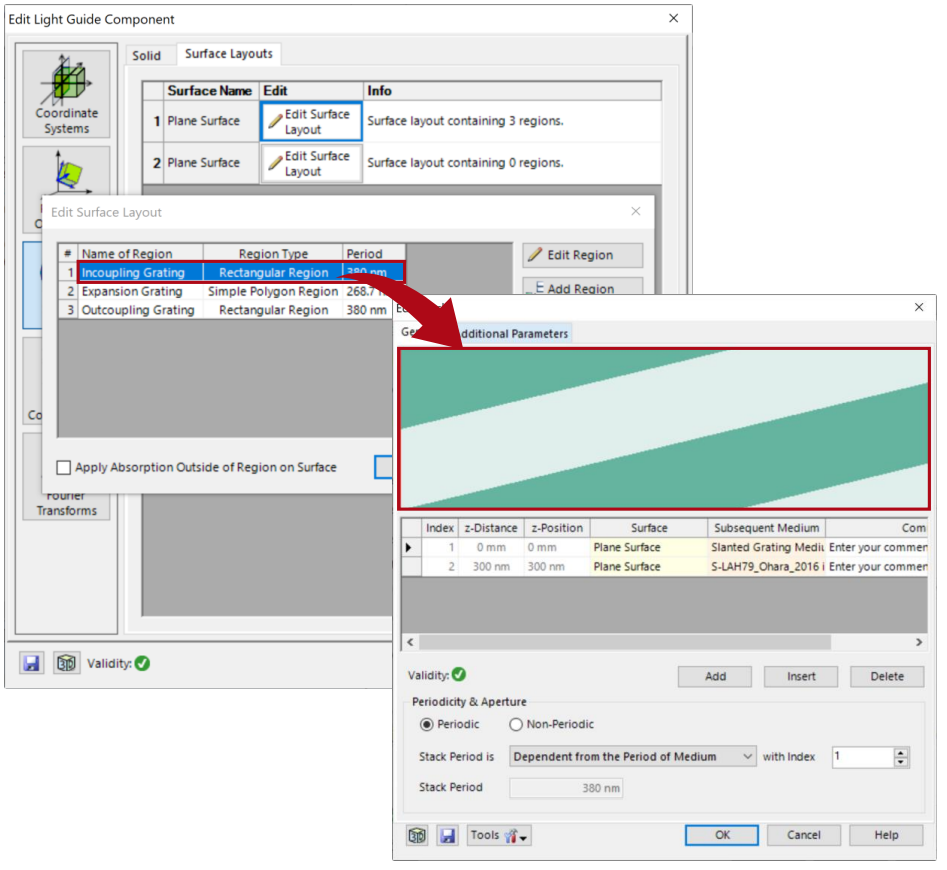
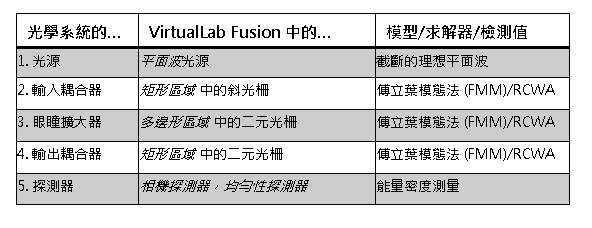
對於輸入耦合器、輸出耦合器和眼瞳擴展器 (EPE),使用了真實光柵。 他們的瑞利矩陣和相應的效率是用 FMM (RCWA) 嚴格計算的。 您可以在以下位置找到有關如何設置的更多資訊:
 如何使用真實光柵結構設置一個光波導 如何使用真實光柵結構設置一個光波導
總結-組件
帶有附加指南的一般工作流程
1. 基本光學光波導設置的配置(不屬於此案例的一部分)
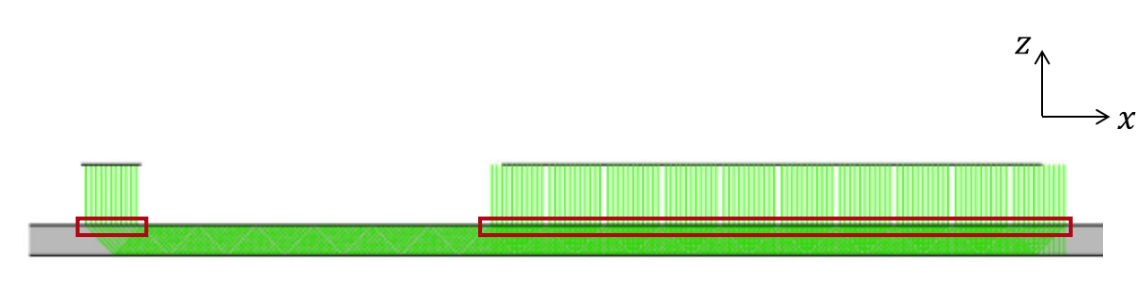
2. 足跡和光柵分析工具的應用,包括生成滿足參數調製所有要求的光學設置
3. 光柵參數所需調製的定義
4. 選擇變數並定義評價函數以優化調製光柵參數。
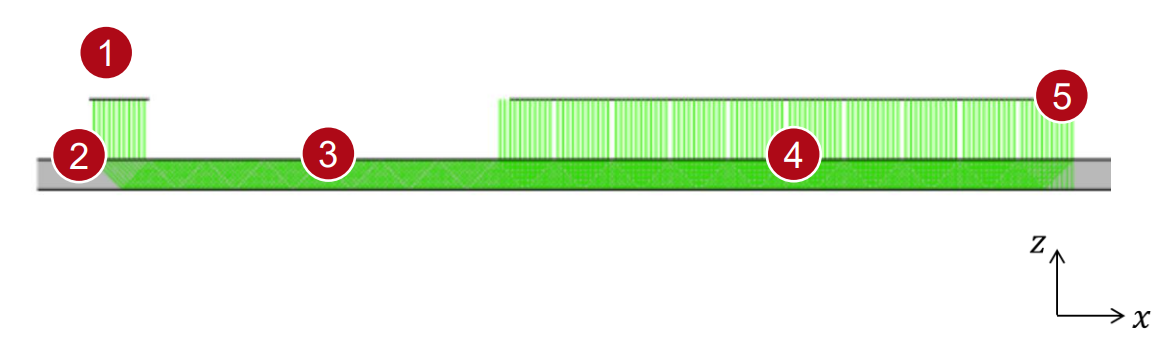
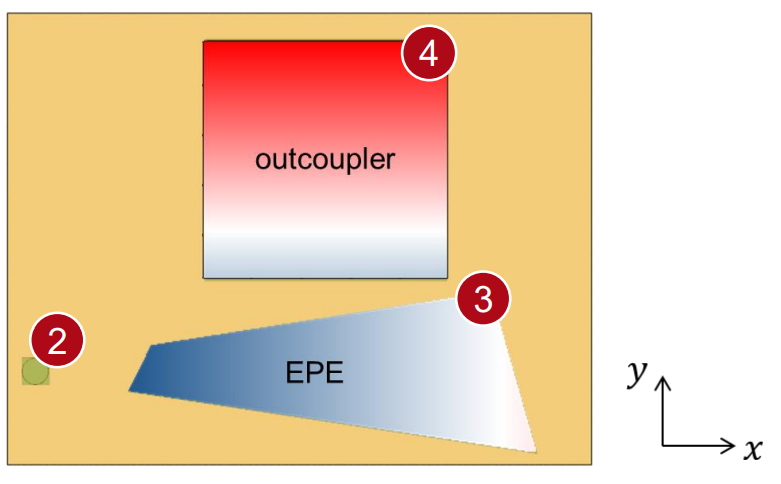
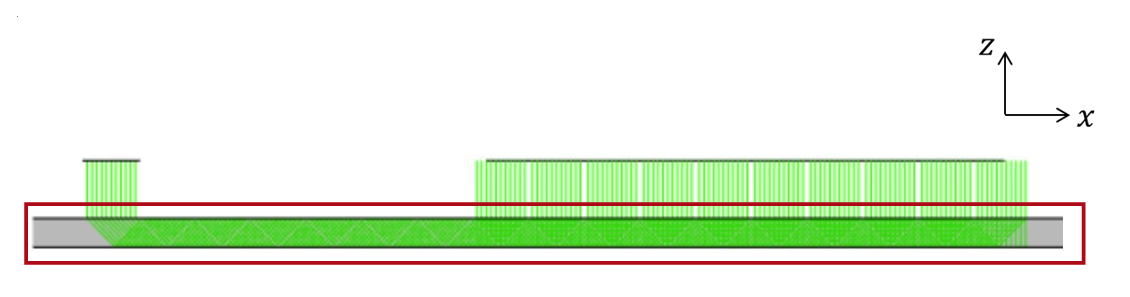
起點是一個現有的、可執行的光波導系統,其中已經包括基本幾何結構(所需距離和定位光柵區域)以及光柵規格(方向、週期、級次)。這個例子取自:
足跡和光柵分析工具用於指定光柵參數變化的所需範圍,並針對特定條件(波長和方向)預先計算相應的瑞利係數。下一步,生成光學設置,其中可以定義平滑參數變化:
足跡和光柵分析
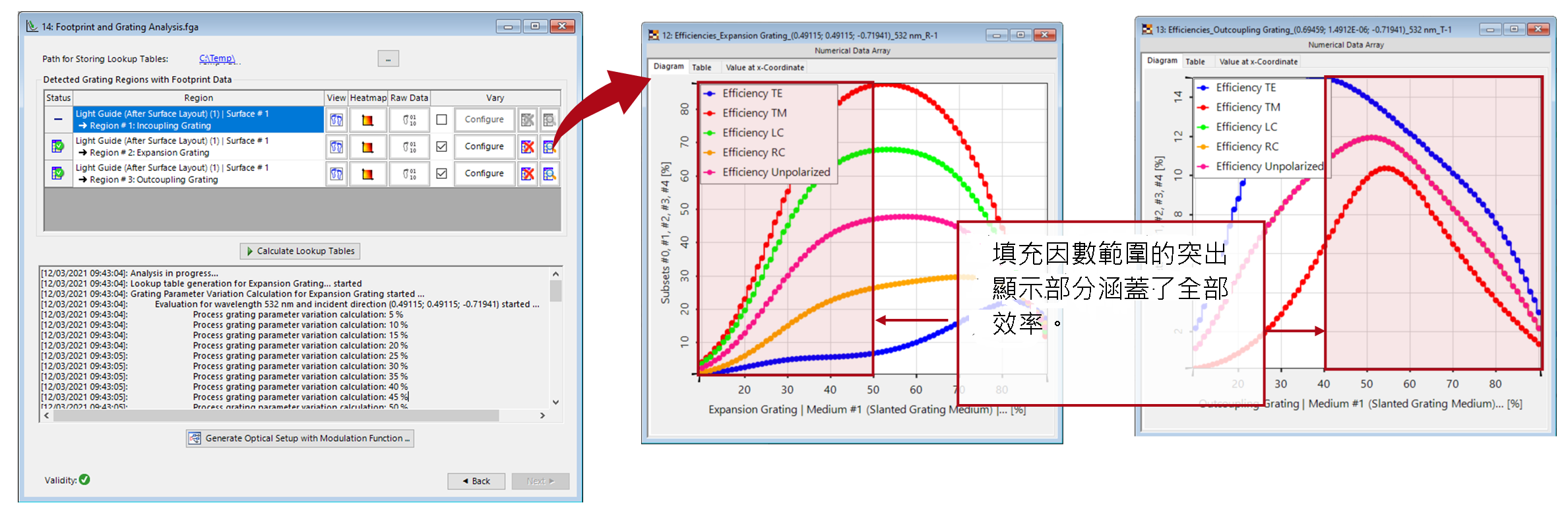
在足跡和光柵分析工具的幫助下,光柵特性(複值)被預先計算並存儲在查閱資料表中,用於選定參數的指定範圍(例如填充因數)。 根據可用的效率調製範圍選擇填充因數的初始範圍。 更多資訊可參見:
光柵分析和在光波導上的平滑調製光柵參數
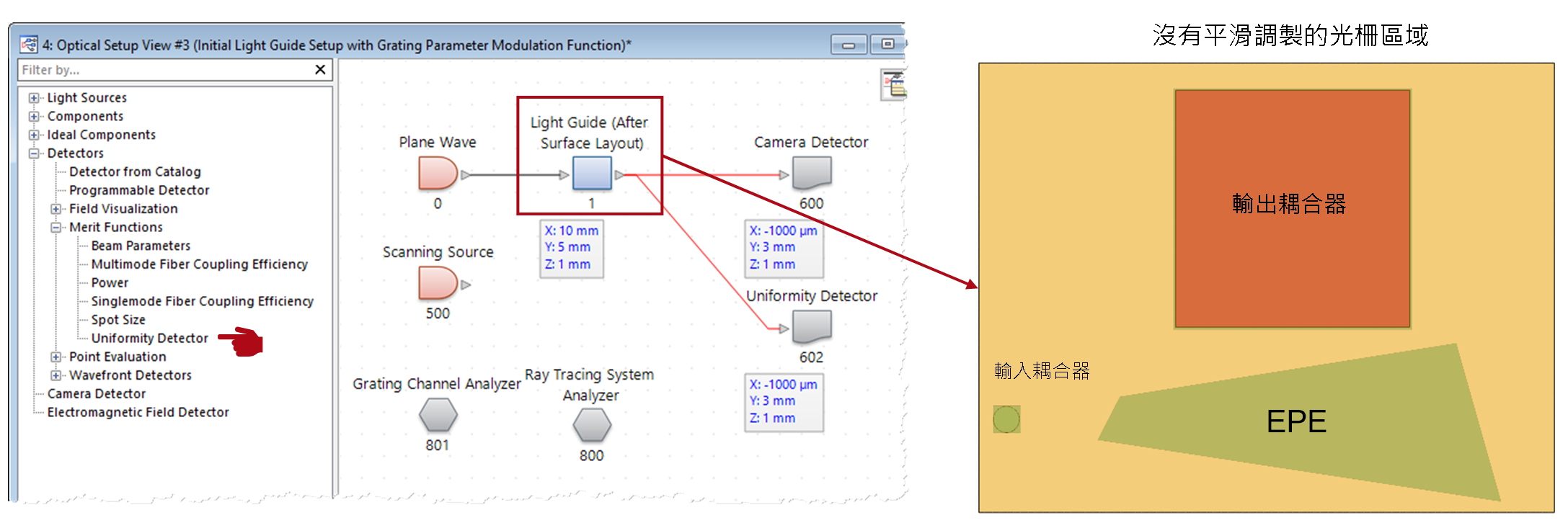
初始系統的生成
• 具有所謂光柵參數調製功能的光波導設置由足跡和光柵分析工具生成(包括光柵特性)。
• Uniformity Detector 用於定義優化的評價函數。
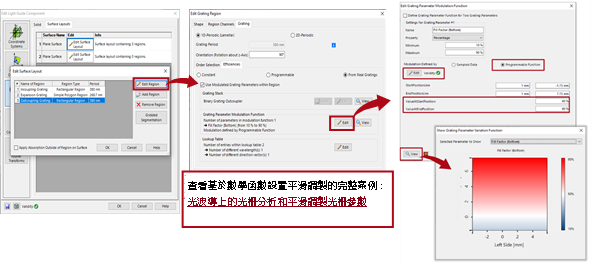
定義光柵區域的調製函數
• 打開光波導元件中區域的編輯對話方塊; 光柵特性並且查閱資料表存儲在光柵區域中。
• 編輯光柵參數調製功能,使其定義為可程式設計功能,光柵參數的預期線性調製由開始和結束位置的值定義(EPE 從左到右邊界,耦出合從上到下)。
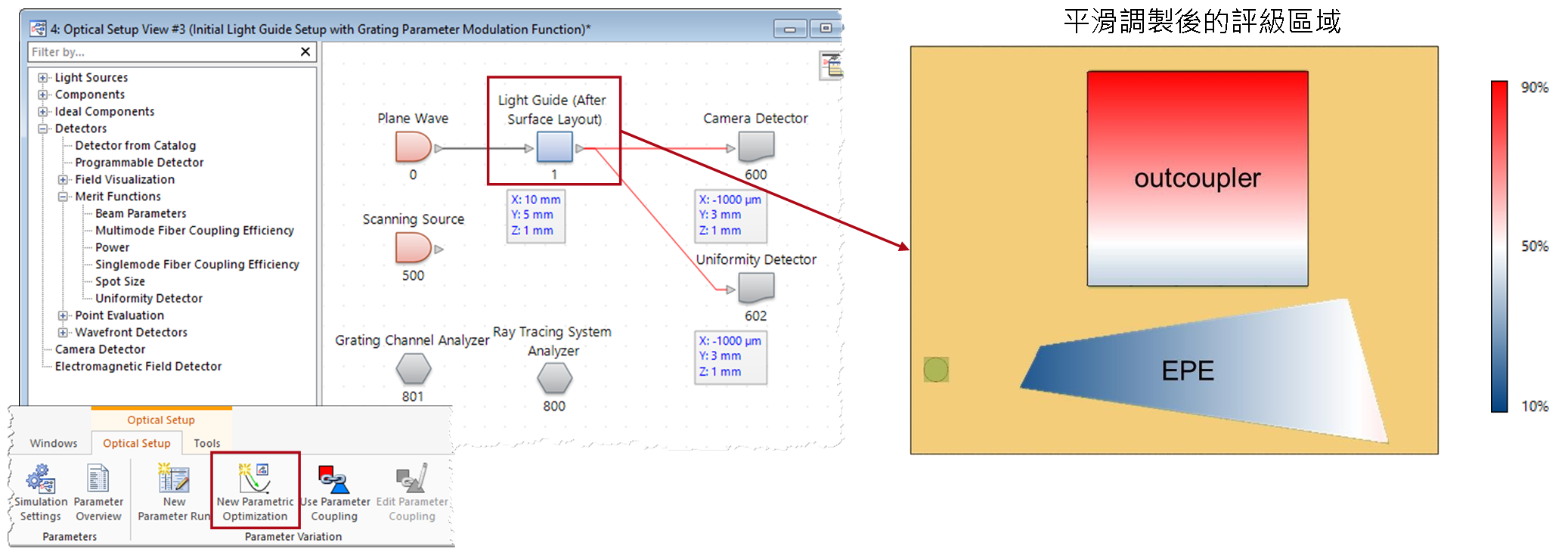
初始系統的生成
在分別為 EPE 和輸出耦合器定義調製後,可以通過 Optical Setup > New Parameter Optimization 啟動參數優化文檔。
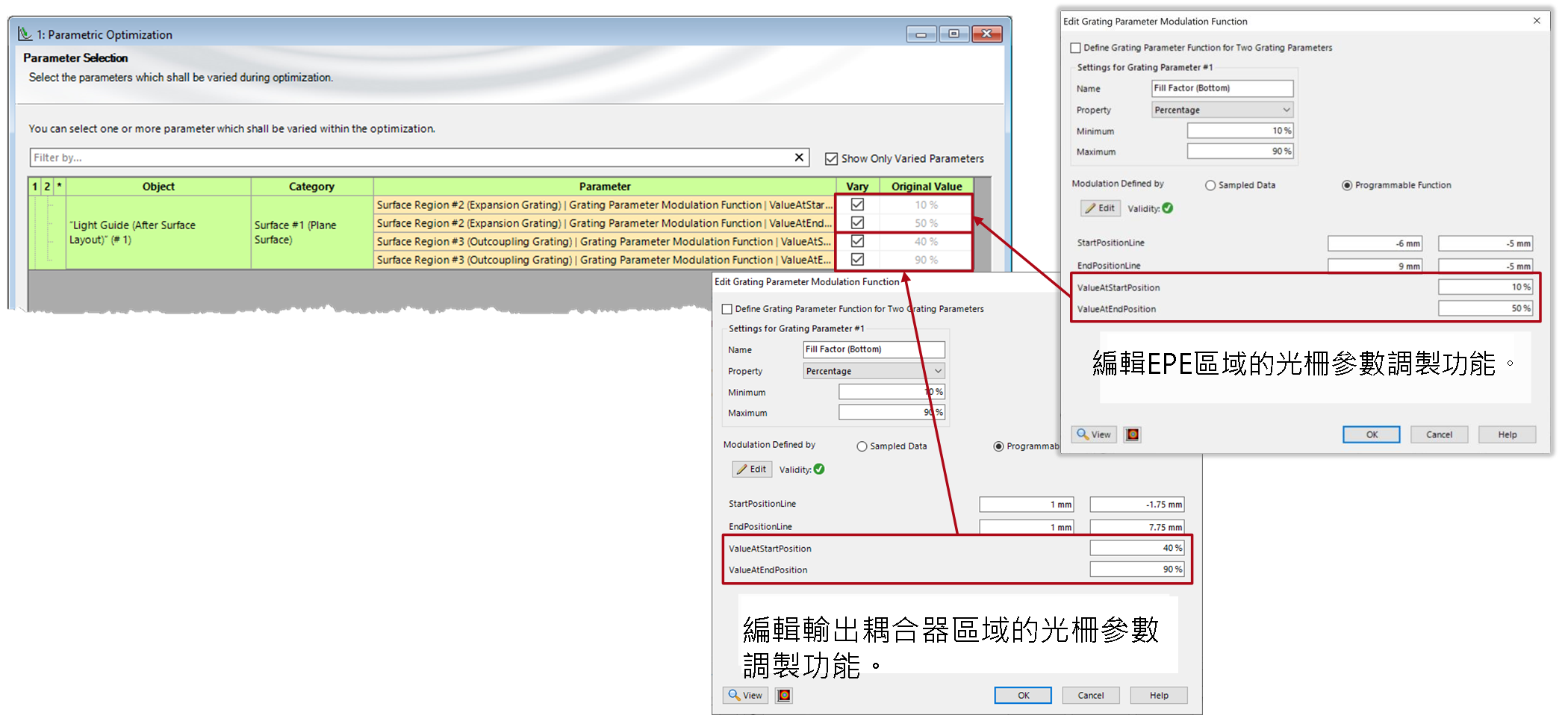
優化設置-選擇參數
• 分別為EPE 和輸出耦合器光柵選擇調製開始和結束位置的填充因數值。
• 根據調製功能編輯器中的設置自動填充原始值。
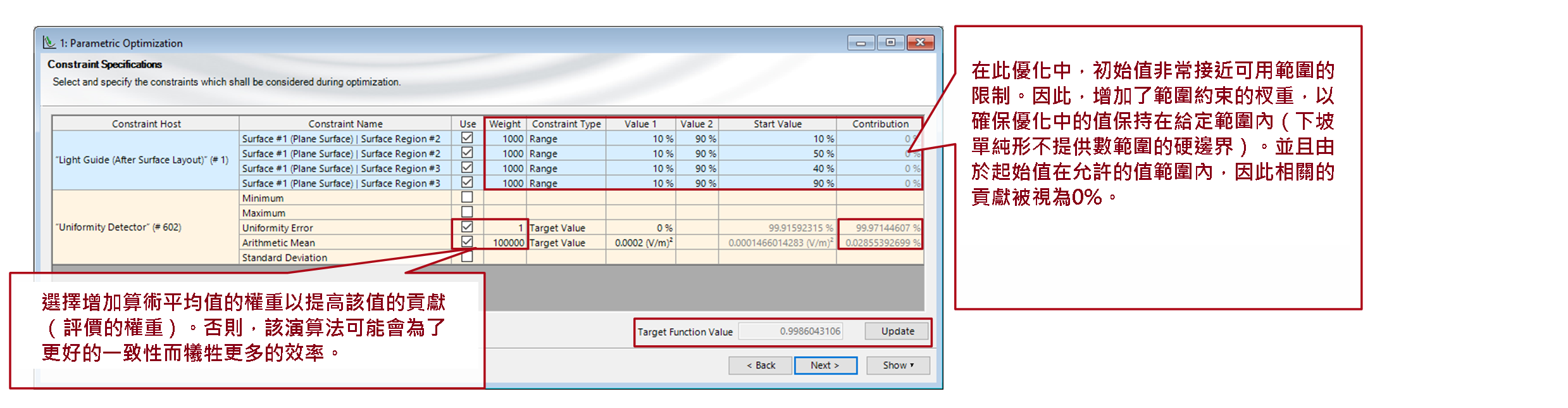
優化設置 - 指定約束
 • 定義變數的可用範圍(此處:EPE 和輸出耦合器的填充係數)。
• 定義變數的可用範圍(此處:EPE 和輸出耦合器的填充係數)。
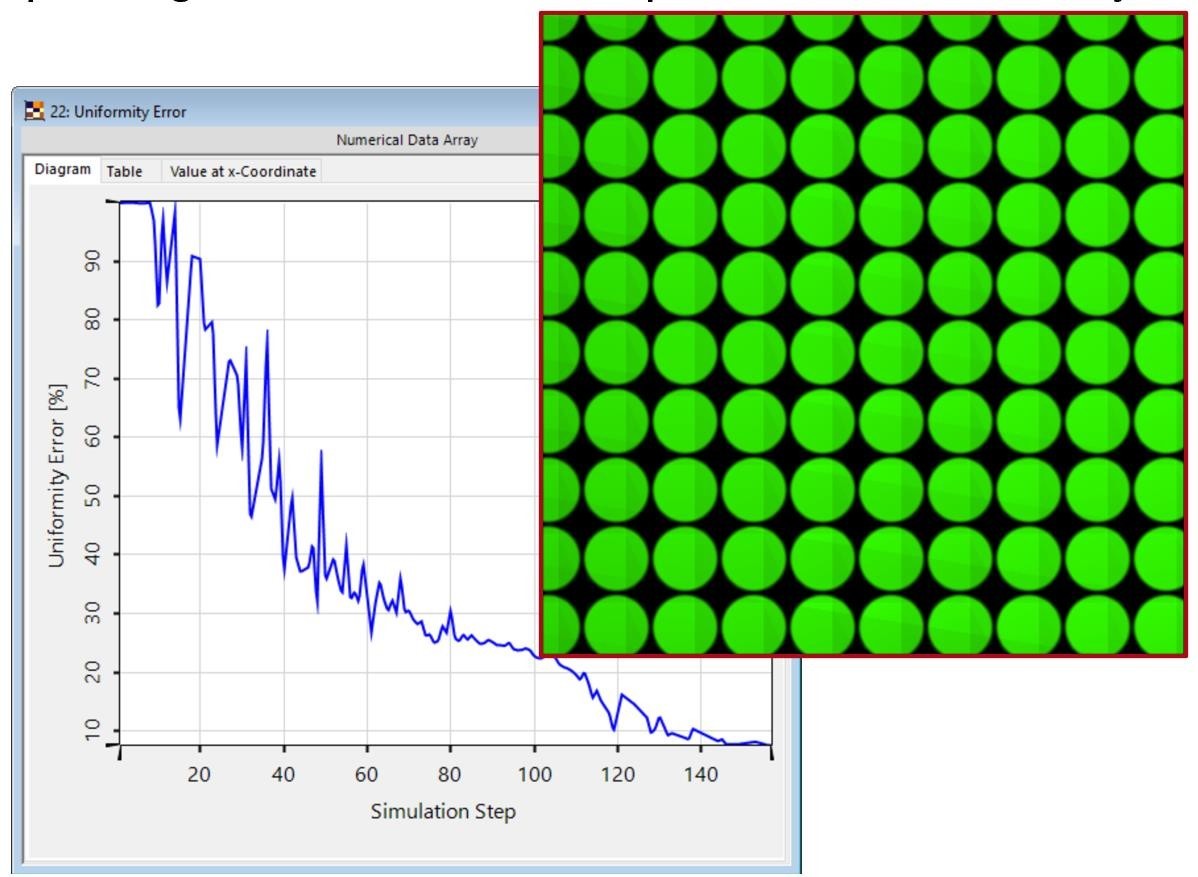
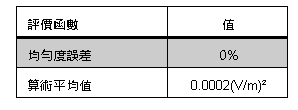
• 為了實現低均勻性誤差和可接受的強度分佈,將均勻性誤差的目標值設置為 0%,並指定算術平均值的目標值。
• 通過定義評價函數的權重值,可以調整優化的貢獻(相關性或優先順序)。
優化結果

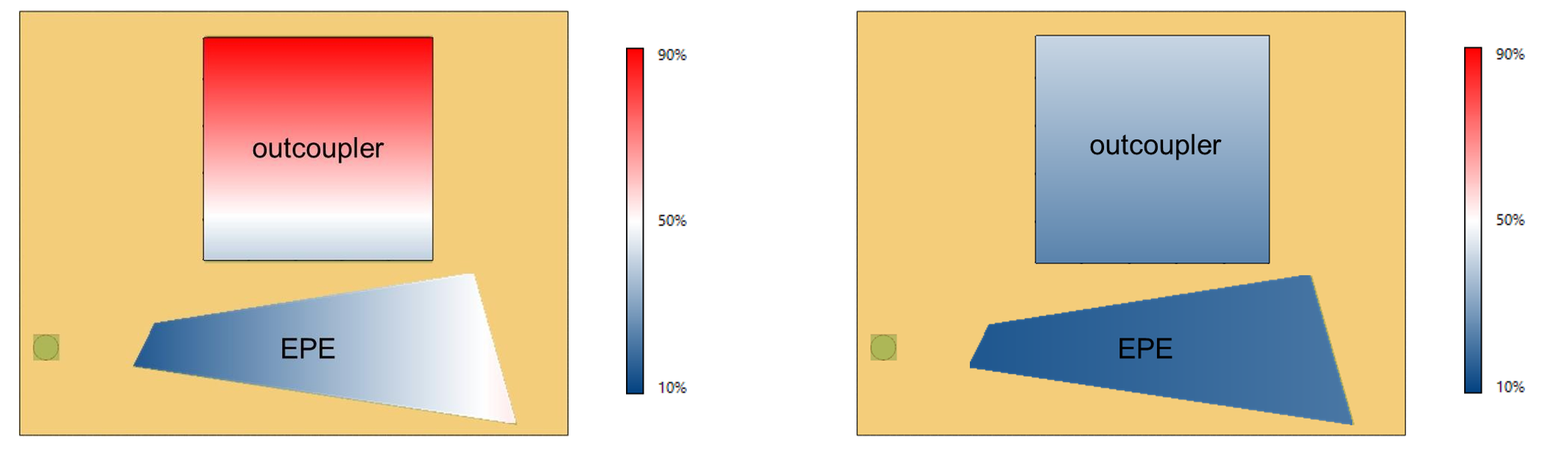
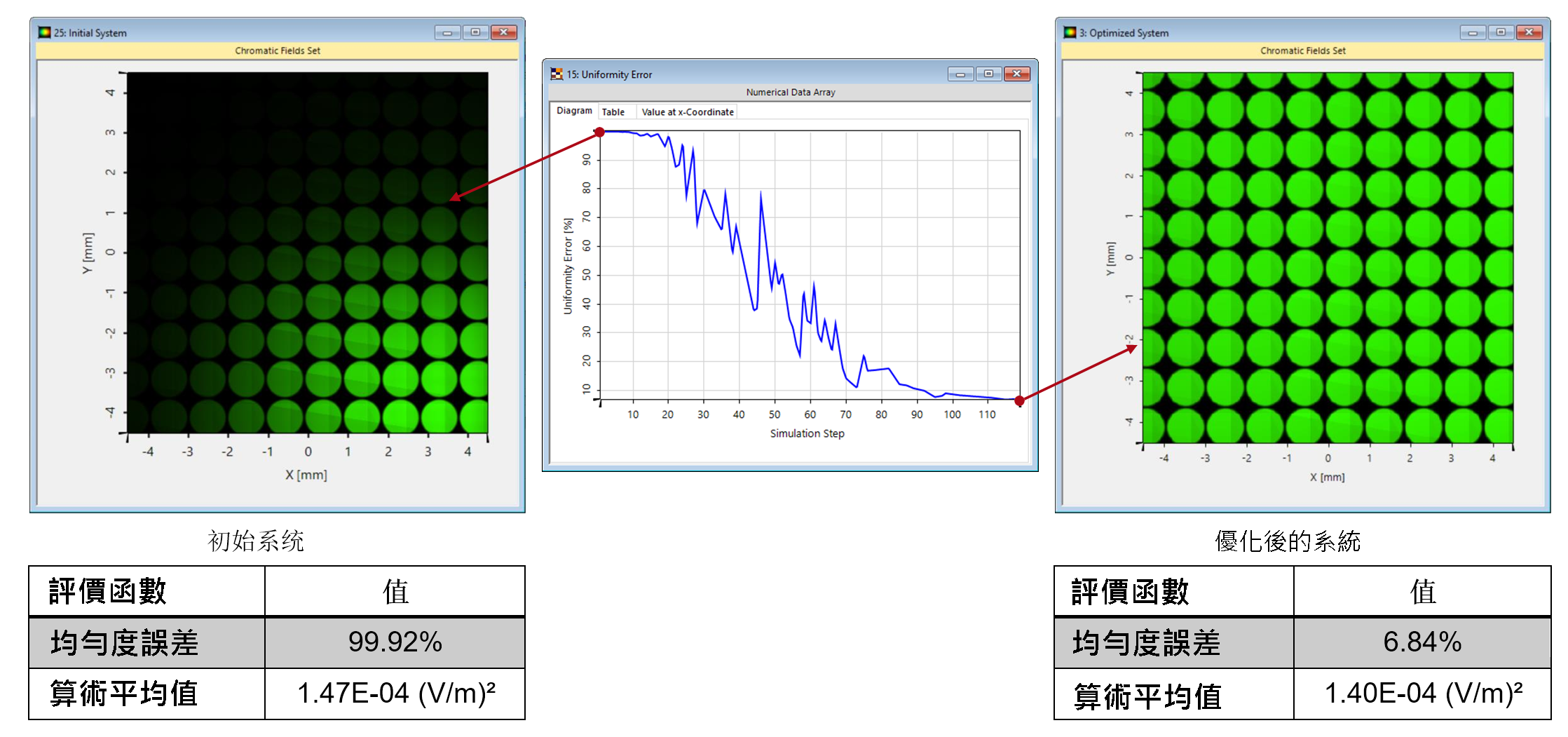
優化均勻性與能量密度
通過眼動範圍對初始和優化系統進行的線掃描揭示了均勻性和局部能量密度的差異。
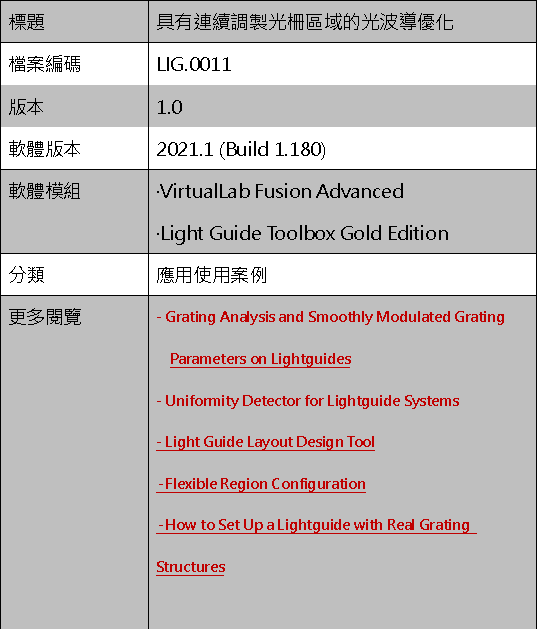
VirtualLab Fusion技術
檔案資訊
|