簡介:鐳射探測和測距系統(LIDAR)
以下四個示例設計演示了如何使用OptiSystem類比光檢測和測距系統(LIDAR),具體如下:
□ 雷射脈衝飛行時間測量
□ 相移測距
□ 調頻連續波(FMCW)直接檢測測距和調頻連續波相干測距
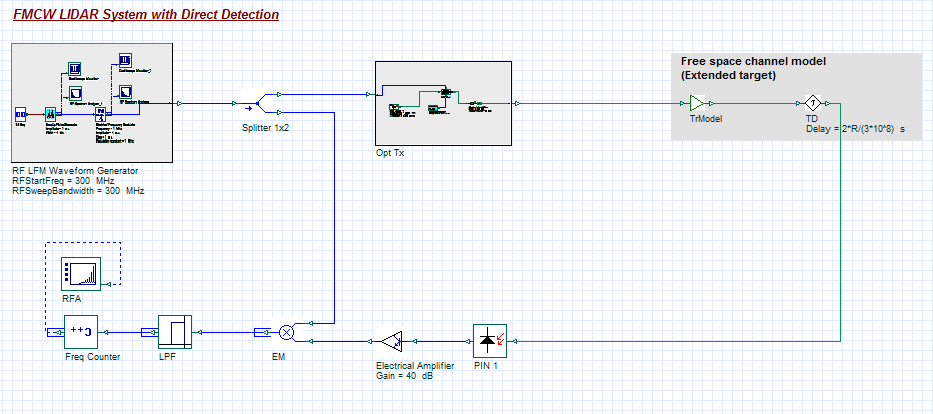
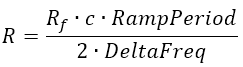
圖1.使用直接檢測的FMCW LIDAR OptiSystem模型示例視圖
1.測距(飛行時間)
1)原理簡介
使用雷射脈衝,飛行時間測距法測量發射脈衝從發射裝置行進到目標並返回接收器所花費的時間。 然後計算
距離[1]
c是光速。
接收信號功率是根據擴展目標模型確定的,計算如下[2]
其中 Pt 是傳輸光功率,D 是接收器孔徑, ρ 目標反射率, □atm 是大氣損耗係數,□opt 是光傳輸系統損耗
因數,R 是目標範圍。
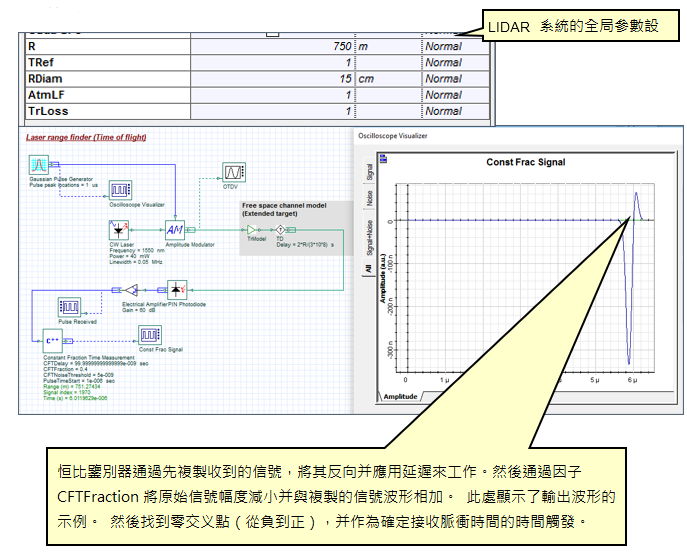
為了可靠地確定到達脈衝的出發時間,使用恒比定時測量[3]方法(用Cpp元件實現)。
圖2.測距儀(TofF)佈局
2)應用案例
□ 下面的示例中,一個高斯脈衝(峰值脈衝時間= 1 us) 傳輸過後從虛擬目標反射(由自由空間通道模型 (擴展
目標)定義) ) 。經過衰減和延遲後,通過Cpp元件恒比定時測量法檢測和後處理接收到的信號。
□ 接收到的脈衝是在抽樣時間6.02e-06秒觸發的,進而發現該範圍為751.27 m(與全域參數範圍設置為
750m相比較)。 通過改變輸入參數CFTDelay,CFTFraction,CFTNoiseThreshold可以修改恒比鑒別器的
靈敏度。
圖3.鐳射測距系統
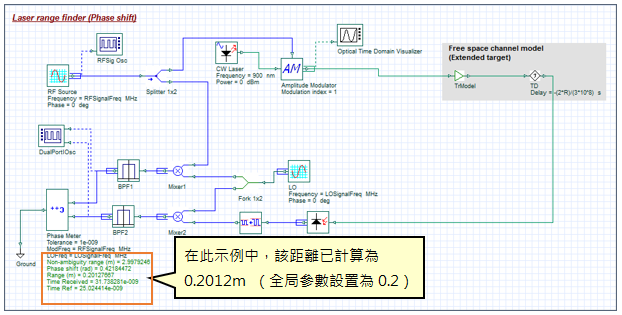
2.測距(相移)
測量物件/目標的距離的另一種方法是使用相移測距儀。 利用該方法,光源以特定頻率Rf被調製並且朝向目標
傳送。 然後用PIN光電二極體跟隨外差接收器檢測反射信號。 相移來源於投射光信號 (□□),並於原始參考信
號做對比,以進行測量並用於計算距離 [1]:
為了提高該系統的精度,參考和接收的調製信號可以與本地振盪器RLO混合,以將接收的波形變頻到較低的頻
率(RLO-Rf)。 然後對這些信號進行帶通濾波(以減少雜訊)並由相位計(使用我們的可程式設計Cpp
元件)進行處理。
圖4.測距儀(相移)佈局
3.測距(FMCW)
最後提出的方法是調頻連續波(FMCW)LIDAR。 已經開發了兩種模型:直接檢測的FMCW LIDAR和相干檢
測的FMCW LIDAR。 兩種模式的工作原理相同。 頻率調製的光發送器發送信號到目標,並且通過光電檢測
器檢測反射信號並與原始線性調頻(LFM)信號混合。 隨著接收信號的時延,產生中頻信號。 使用頻率計數
器(用我們的Cpp元件實現),測量檢測到的Rf信號,然後用於如下計算[4]:
其中RampPeriod等於全域參數的Time window ,DeltaFreq 等於參數RFSweepBandwidth(在子系統RF
LFM Waveform Generator的組件參數內設置)。
兩個檢測系統之間的唯一區別是使用平方律檢波,而另一個使用相干零差檢測器在混合前恢復輸入光信號
(後者因此提供更高的靈敏度,因為檢測過程是散粒雜訊限制)
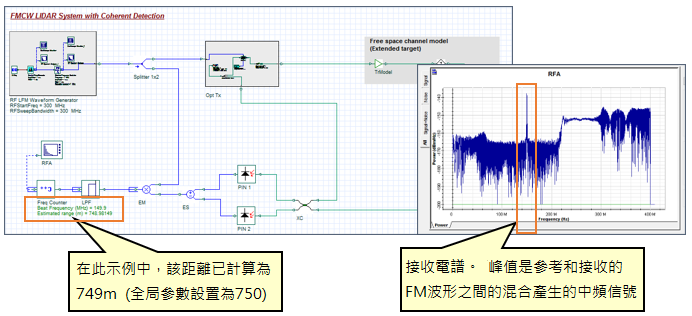
圖5.FMCW相干檢測佈局
[1]: Laser ranging: a critical review of usual techniques for distance measurement, Optical Engineering, Vol.
40, No. 1.(2001), pp. 10-19 by Markus C. Amann, Thierry Bosch, Marc Lescure, Risto Myllylä, Marc Rioux
[2]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques
for FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection
and Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013)
[3]:Fast-Timing Discriminator Introduction, Ortec Inc., http://www.ortec-online.com/-/media/ametekortec/other/
fast-timing-discriminator-introduction.pdf?la=en (accessed 10 Feb 2017)
[4]: Ahmed H. Elghandour; Chen D. Ren; Modeling and comparative study of various detection techniques for
FMCW LIDAR using OptiSystem, Proc. SPIE 8905, International Symposium on Photoelectronic Detection and
Imaging 2013: Laser Sensing and Imaging and Applications, 890529 (September 19, 2013)
|