在本次案例中,我們將利用無人機(UAV)元件進行模擬,分析以下4中情況下對無人機通道的影響:
1. 無人機(UAV)的理想傳輸通道
2. 無人機(UAV)光束漂移和抖動
3. 無人機(UAV)在FSO中的湍流影響
4. 無人機(UAV)中多模光傳輸
1. 無人機(UAV)的理想傳輸通道
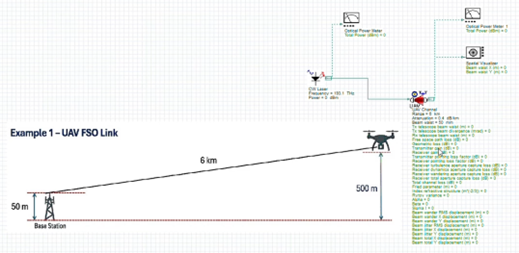
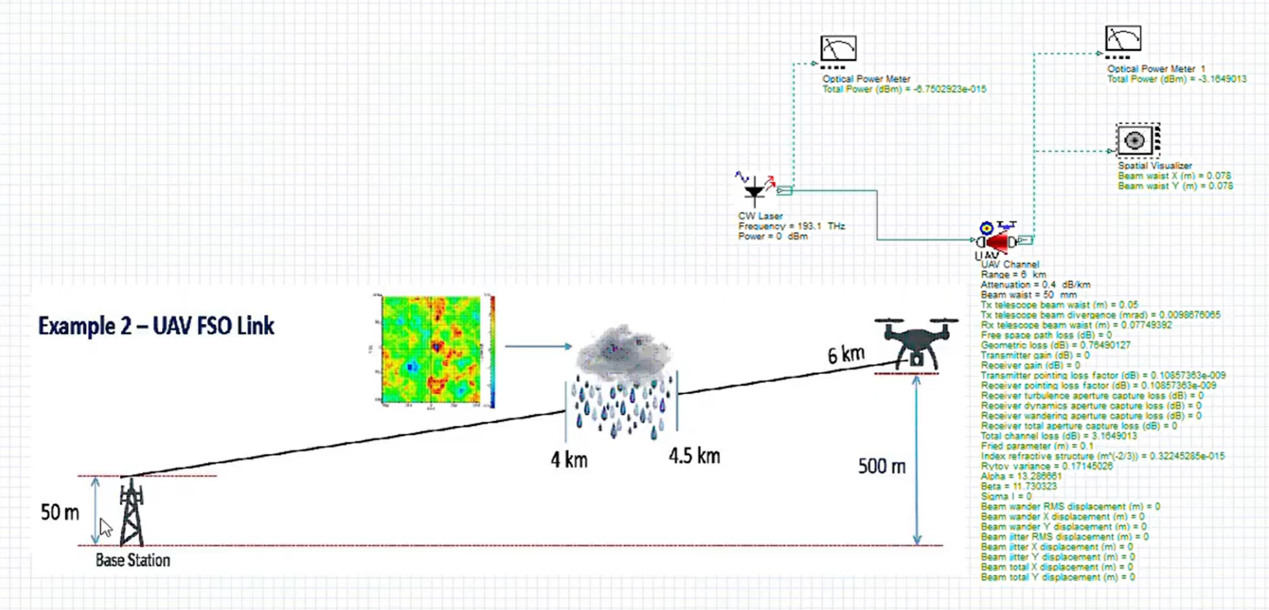
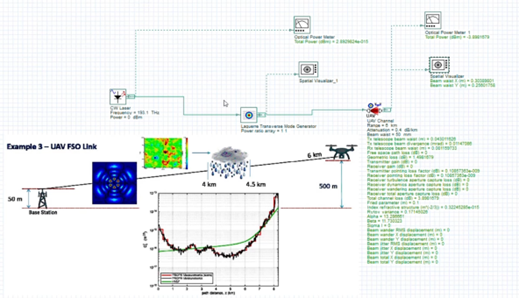
本示例中,無人機懸停在距地面500m高度,此為接收機高度;發射機為固定基站,架設高度距地面50m。收發兩端的視距傳輸距離為6km。
系統佈局如圖1所示。
圖1無人機(UAV)的理想傳輸通道項目佈局
需要說明的是,示意圖並非按比例繪製,該配置對應無人機通道的預設參數設置。
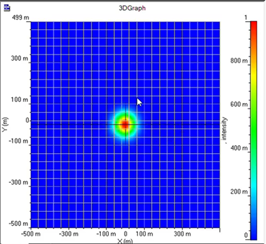
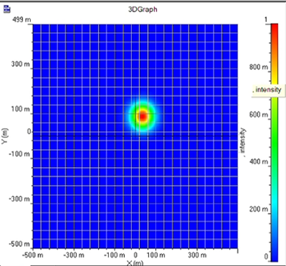
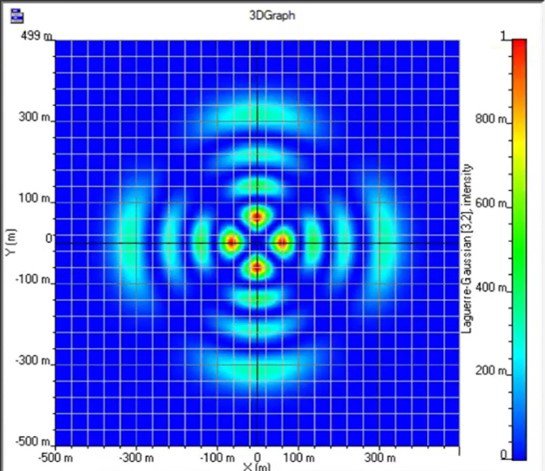
模擬完成後,觀察輸出光束可知:發射端光束腰斑 50 mm,接收端光束腰斑變為77mm,圖2為經過UAV通道後的空間輸出模式。
圖2 理想傳輸條件下UAV通道空間輸出模式
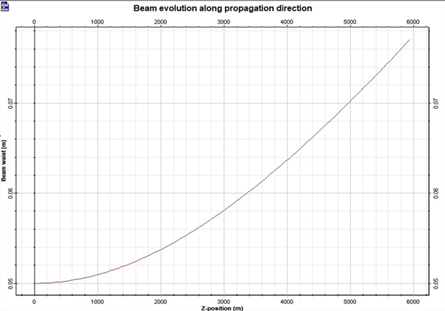
查看UAV組件的二維繪圖,可清晰看到光束沿傳輸距離的演變過程 —— 從 50 mm擴展至 77 mm,這是自由空間光通信中高斯光束腰斑的典型展寬現象,如圖3所示。
圖3光束沿傳輸距離的演變
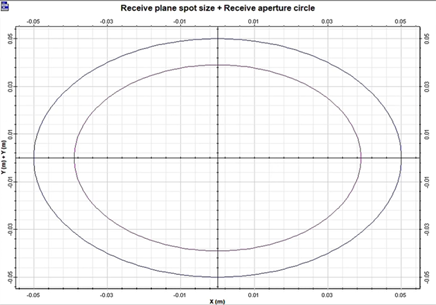
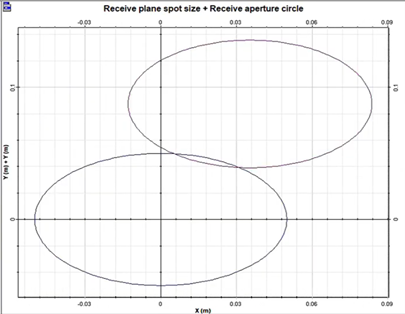
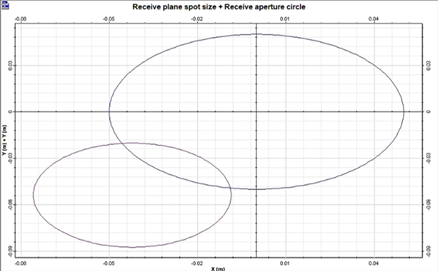
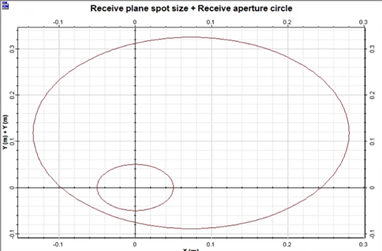
同時可查看接收機孔徑與接收光斑尺寸,如圖4。外圈為接收機孔徑,內圈為接收光斑尺寸,可見光束完全被接收機孔徑包裹。
圖4接收機孔徑與接收光斑尺寸
2. 無人機(UAV)光束漂移和抖動
下面分析接收機端無人機機械振動的影響。
開啟光束抖動與光束漂移功能,運行模擬後,可觀察到光束的變化,如圖5所示。圖6為考慮光束漂移和抖動後接收機孔徑與接收光斑尺寸。
圖5 考慮光束漂移和抖動UAV通道空間輸出模式
圖6考慮光束漂移和抖動後接收機孔徑與接收光斑尺寸
3.無人機(UAV)在FSO中的湍流影響
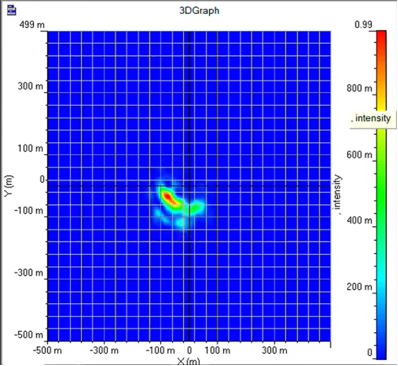
接下來,我們將重點分析湍流區域相位對傳輸的影響。如圖7所示,我們要模擬大氣空間湍流在4 km至 4.5 km這段路徑上的作用效果。
圖7考慮大氣湍流的無人機(UAV)通道專案佈局
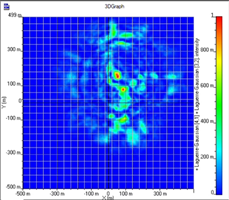
運行模擬後,可以看到光束經過大氣湍流後出現明顯的畸變,如圖8。
圖8考慮大氣湍流UAV通道空間輸出模式
計算中若要疊加所有效應,可像之前一樣開啟全鏈路光束漂移與抖動。UAV元件二維視圖中顯示的接收機孔徑與接收光斑,僅為粗略估算的光束中心位置,這個圓形標記不能完全反映畸變空間模式的真實湍流狀態,只是近似表示接收機孔徑與接收光斑的相對位置。
圖9考慮大氣湍流接收機孔徑與接收光斑
4.無人機(UAV)中多模光傳輸
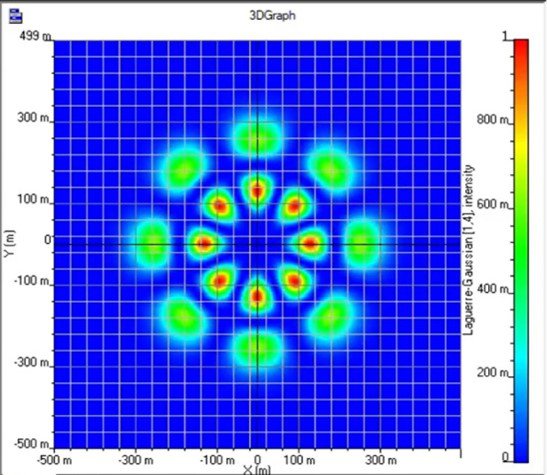
接下來,我們把光源換成拉蓋爾橫向模式發生器,為每個偏振態生成2 個模式,總計4 個模式,專案佈局如圖10。
圖10無人機(UAV)中多模光傳輸專案佈局
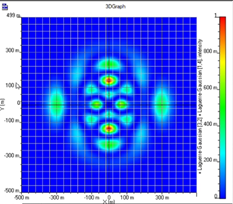
UAV元件提供兩種傳輸模式:Independent和Combined,Independent為獨立傳輸模式,Combined為同調傳輸模式。圖11為各模式獨立傳輸,互不影響,X 偏振下可分別查看 0 階與 1 階模式;圖12為所有輸入模式在傳輸起點同調疊加後整體傳輸。
a)X偏振下0階模式
b)X偏振下1階模式
圖11 Independent模式下X 偏振的不同模式
圖12 Combined模式下所有輸入模式同調疊加
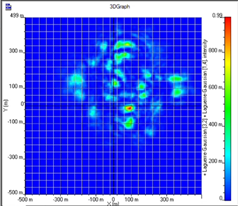
我們同樣可以考慮光束漂移和抖動以及空間湍流,UAV傳輸模式選擇Combined,圖13為不同偏振態下的空間輸出模式,圖14為接收機孔徑與接收光斑。
a)X偏振下空間輸出模式
b)Y偏振下空間輸出模式
圖13 考慮光束漂移、抖動和大氣湍流下的多模光傳輸輸出模式
圖14考慮光束漂移、抖動和大氣湍流下的多模光傳輸接收機孔徑與接收光斑
|